In the realm of physics and engineering, understanding the distribution and dynamics of mass is crucial for accurate calculations. One particularly powerful concept is the Parallel Axis Theorem, a cornerstone principle that offers invaluable insights into moments of inertia. This theorem simplifies the process of calculating the moment of inertia for any axis parallel to one for which the moment of inertia is already known. Let’s delve deep into this theorem and uncover its practical applications and significance.
Key Insights
- The Parallel Axis Theorem enables the simplification of calculations for determining the moment of inertia of an object about any axis parallel to one about which the moment of inertia is already known.
- Technically, it is an essential tool for engineers and physicists working on rotational dynamics problems.
- An actionable recommendation is to utilize this theorem to avoid complex computations when transitioning between different axes.
Foundations of the Parallel Axis Theorem
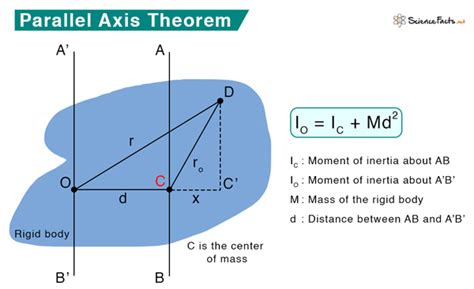
The Parallel Axis Theorem states that the moment of inertia (I) of a body about any axis is equal to the moment of inertia of the body about a parallel axis through its center of mass plus the product of the mass (m) of the body and the square of the distance (d) between the two axes. Mathematically, it’s expressed as: I = Icm + md2 where: - I is the moment of inertia about the new axis. - Icm is the moment of inertia about the center of mass. - m is the mass of the object. - d is the distance between the two parallel axes.Applications and Real-World Examples
In practical scenarios, the Parallel Axis Theorem is especially beneficial in rotational dynamics where calculating moments of inertia about various axes is necessary. For instance, consider a mechanical engineer tasked with analyzing the rotational inertia of a flywheel used in an automotive engine. Knowing the moment of inertia about the central axis, the engineer can easily determine the inertia about any other axis parallel to it using the Parallel Axis Theorem. This facilitates streamlined design and efficiency assessments.Another compelling example can be found in robotics. For instance, calculating the inertia tensor for robotic arms where the end effector’s orientation needs to change frequently is much more efficient when employing the Parallel Axis Theorem, rather than recalculating from scratch each time.
Technical Nuances
A technical consideration is that the accuracy of using the Parallel Axis Theorem relies on the precise determination of the distance (d) between the axes and the body’s center of mass. Any error in this measurement directly translates to inaccuracies in the resulting moment of inertia values.Precision is Key
Ensuring precision means leveraging tools such as coordinate measurement machines (CMMs) or high-resolution imaging techniques to pinpoint the center of mass accurately. Such technical rigor ensures the practical applicability of the theorem remains intact and reliable.Can the Parallel Axis Theorem be applied to any shape?
Yes, the theorem applies to any rigid body regardless of its shape, as long as the distance between the axes and the body’s center of mass is accurately determined.
What happens if the distance between the axes is zero?
When the distance is zero, the theorem simplifies to I = Icm, meaning the moment of inertia about an axis through the center of mass remains unchanged.
With this comprehensive exploration, the Parallel Axis Theorem emerges as a vital instrument in the toolkit of professionals engaged in fields requiring rotational dynamics analysis. By grasping its application and precision requirements, engineers and physicists can leverage this theorem to enhance their problem-solving efficiency and accuracy.